|
Hamlib
3.0.1
|
|
Hamlib
3.0.1
|
#include <stdlib.h>#include <string.h>#include <unistd.h>#include <stdio.h>#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h>#include "hamlib/rotator.h"#include "serial.h"#include "parallel.h"#include "usb_port.h"#include "network.h"#include "rot_conf.h"#include "token.h"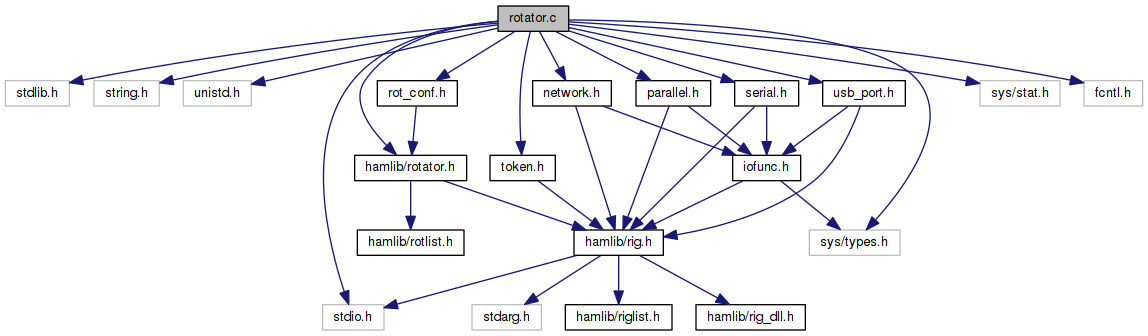
Functions | |
| int | foreach_opened_rot (int(*cfunc)(ROT *, char *), char *data) |
| execs cfunc() on each opened rot More... | |
| ROT * | rot_init (rot_model_t rot_model) |
| allocate a new ROT handle More... | |
| int | rot_open (ROT *rot) |
| open the communication to the rot More... | |
| int | rot_close (ROT *rot) |
| close the communication to the rot More... | |
| int | rot_cleanup (ROT *rot) |
| release a rot handle and free associated memory More... | |
| int | rot_set_position (ROT *rot, azimuth_t azimuth, elevation_t elevation) |
| set the azimuth and elevation of the rotator More... | |
| int | rot_get_position (ROT *rot, azimuth_t *azimuth, elevation_t *elevation) |
| get the azimuth and elevation of the rotator More... | |
| int | rot_park (ROT *rot) |
| park the antenna More... | |
| int | rot_stop (ROT *rot) |
| stop the rotator More... | |
| int | rot_reset (ROT *rot, rot_reset_t reset) |
| reset the rotator More... | |
| int | rot_move (ROT *rot, int direction, int speed) |
| move the rotator in the specified direction More... | |
| const char * | rot_get_info (ROT *rot) |
| get general information from the rotator More... | |
Rotator interface.
Hamlib interface is a frontend implementing rotator wrapper functions.
 1.8.8
1.8.8Hamlib documentation for version 3.0.1 -- Wed Jan 13 2016 15:05:23
Project page: http://www.hamlib.org

